Sensor Fusion laboratory simply aims at contributing to the perception of autonomous systems by using various techniques in estimation theory. We develop state of the art methods and algorithms for increasing the accuracy and quality of the estimation process by combining sensory information collected from different (possibly heterogeneous) resources. We aim at exploiting the strength of different types of sensors in a complementary fashion and combine them with the information extracted from mathematical models. The application areas are vast and they extend fast with emerging technologies.
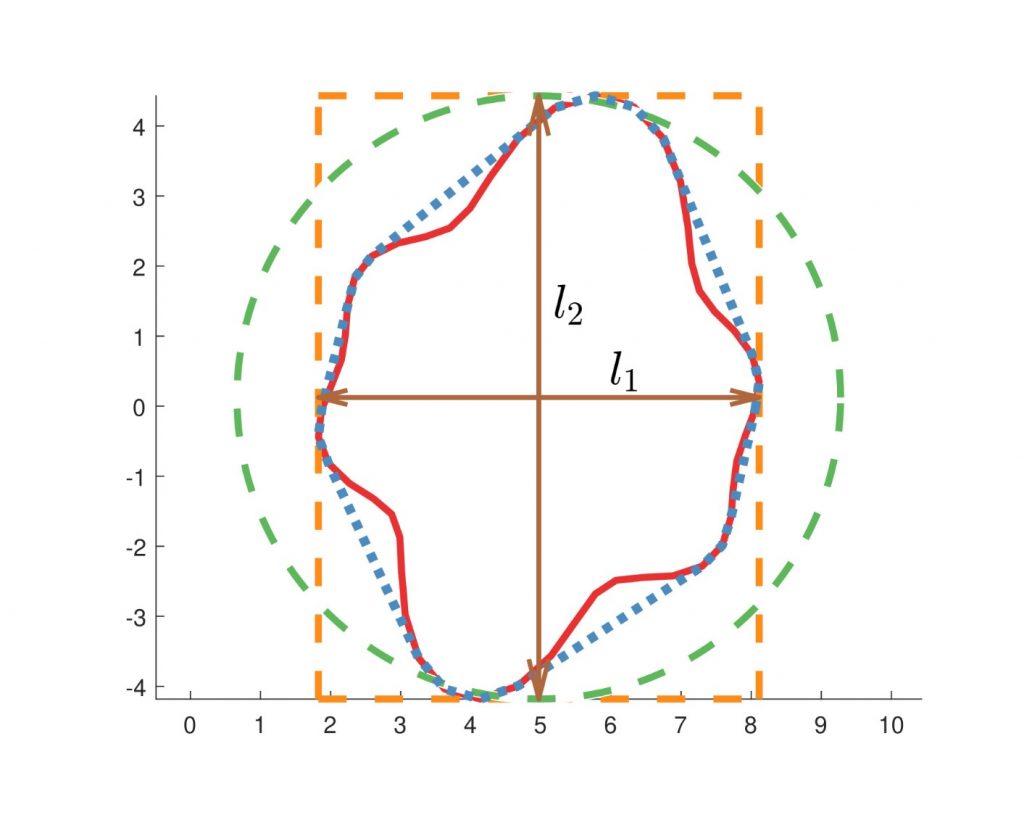
Random Matrix Based Extended Target Tracking with Orientation: A New Model and Inference

In this study, we propose a novel extended target tracking algorithm which is capable of representing the extent of dynamic objects as an ellipsoid with a time-varying orientation angle. We use the variational Bayes technique to perform approximate inference, where the Kullback-Leibler divergence between the true and the approximate posterior is minimized by performing fixed-point iterations. The proposed method outperforms the state-of-the-art methods when compared with respect to accuracy and robustness.
Extended Target Tracking and Classification Using Neural Networks
In this work, we propose to use a naively deep neural network, which consists of one input, two hidden and one output layers, to classify dynamic objects regarding their shape estimates which come from an ETT algorithm. The proposed method shows superior performance in comparison to a Bayesian classifier for simulation experiments.
Extended Object Tracking and Shape Classification
In this work, we propose to use a Bayesian classifier to identify different objects based on their contour estimates during tracking. The proposed method also incorporates the uncertainty information provided by the estimation covariance of the tracker algorithm.
Multi-Ellipsoidal Extended Target Tracking using Variational Bayes based Marginalized Particle Filter
In this work, the target extent is modeled using multiple ellipsoids and estimated jointly with the kinematic state. The potential of variational approximation is consolidated with the idea of “Gaussian – inverse Wishart” conjugacy to satisfy the Bayesian filtering formulations. Rao-Blackwellization and optimal importance sampling methods are utilized to boost the performance of the filter.